
在小型机械手里面应该采用谐波减速器比较多(谐波减速器三组件:刚轮、柔轮、波发生器)。谐波减速器体积小、重量轻、承载能力大、运动精度高,单级传动比大,其工作原理理解起来比较简单了。
而RV减速器据说具有长期使用不需再加润滑剂、寿命长、刚度好、减速比大、低振动、高精度、保养便利等优点,适用于在机器人上使用。它的传动效率为0.8,相对于同样减速比的齿轮组,这样的效率是很高的。RV减速器的缺点是重量重,外形尺寸较大。估计就是这个缺点使其一般只应用于大型的焊接及搬运机械手了。很想找一点RV减速器的原理的资料来看看,在网上搜索了老半天,也没有找到一点有用的关于其工作原理的资料,尽是一些代理和出售的广告。希望有高手能够详细指点其原理一二,不过还好图片还是找到一点,好东西和大家一起分享,下面是某RV减速器的拆解图片:

RV减速器的结构分析
本课题研究的减速器型号为RV-6AⅡ,用于120kg点焊机器人上,其额定工况是输入转速1500r/min,负载为58N·m,下图为利用UG生成的该型号RV减速器的爆炸图,主要由齿轮轴、行星轮、曲柄轴、转臂轴承、摆线轮、针轮、刚性盘及输出盘等零部件组成。
一、零部件介绍
1.齿轮轴:齿轮轴用来传递输入功率,且与渐开线行星轮互相啮合。
2.行星轮:它与转臂(曲柄轴)固联,两个行星轮均匀地分布在一个圆周上,起功率分流的作用,即将输入功率分成两路传递给摆线针轮行星机构。
3.转臂(曲柄轴)H:转臂是摆线轮的旋转轴。它的一端与行星轮相联接,另一端与支撑圆盘相联接,它可以带动摆线轮产生公转,而且又支撑摆线轮产生自转。
4.摆线轮(RV齿轮):为了实现径向力的平衡在该传动机构中,一般应采用两个完全相同的摆线轮,分别安装在曲柄轴上,且两摆线轮的偏心位置相互成180°。
5.针轮:针轮与机架固连在一起而成为针轮壳体,在针轮上安装有30个针齿。
6.刚性盘与输出盘:输出盘是RV型传动机构与外界从动工作机相联接的构件,输出盘与刚性盘相互联接成为一个整体,而输出运动或动力。在刚性盘上均匀分布两个转臂的轴承孔,而转臂的输出端借助于轴承安装在这个刚性盘上。
二、传动原理
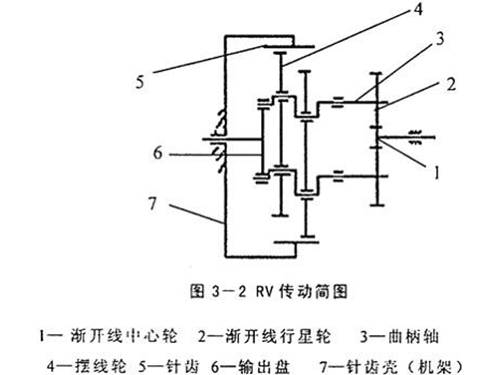
图3-2是RV传动简图。它由渐开线圆柱齿传输线行星减速机构和摆线针轮行星减速机构两部分组成。渐开线行星齿轮3与曲柄轴2连成一体,作为摆线针轮传动部分的输入。如果渐开线中心齿轮1顺时针方向旋转,那么渐开线行星齿轮在公转的同时还有逆时针方向自转,并通过曲柄带动摆线轮作偏心运动,此时摆线轮在其轴线公转的同时,还将在针齿的作用下反向自转,即顺时针转动。同时通过曲柄轴将摆线轮的转动等速传给输出机构。为计算RV传动的传动比,将上述的传动简图用所示的结构简图代替。该机构简图包括两个简单行星机构:x1和x2。输出件A为中心轮1,输出件B为输出盘6,且有ω6=ω4。支承件E为针轮7,渐开线行星轮2与转臂(曲柄轴)3均为辅助件d。
三、RV传动过程剖析
1.第一级减速的形成执行电机的旋转运动由齿轮轴传递给两个渐开线行星轮,进行第一级减速。
2.第二级减速的形成行星轮的旋转通过曲柄轴带动相距180°的摆线轮,从而生成摆线轮的公转;同时由于摆线轮在公转过程中会受到固定于针齿壳上的针齿的作用力而形成与摆线轮公转方向相反的力矩,也造就了摆线轮的自转运动,这样完成了第二级减速。
3.运动的输出通过两个曲柄轴使摆线轮与刚性盘构成平行四边形的等角速度输出机构,将摆线轮的转动等速传递给刚性盘及输出盘。
 首 页
首 页



 18998063935
18998063935
 手机APP二维码
手机APP二维码
